Vectors are defined by magnitude and direction. Vectors can be defined as the line segment AB is a vector which is denoted by
\(\begin{array}{l}\vec a\ \text{and is read as vector a.}\end{array} \)
Point A is called the initial point from where AB starts. Point B is called the terminal point where AB ends, and the distance between A and B is called as magnitude or length of the vector \(\begin{array}{l}\vec a\ \text{and is denoted by}\ |\vec a|.\end{array} \)
The arrow indicates the direction of the vector.
Position Vectors
The position vector of a point P(x, y, z), with respect to origin O (0, 0, 0), is drawn. Its magnitude will be given by
\(\begin{array}{l}|OP| = \sqrt{x^2+y^2+z^2},\ \text{and the vector}\ \vec{OP}\end{array} \)
will have O and P as its initial and terminal points, respectively. This vector denotes the position vector of point P with respect to O.
Types of Vectors
- Zero Vector: A vector which has got the same initial and ending points.
\(\begin{array}{l}\text{It is denoted by}\ \vec O.\end{array} \)
- Unit Vector: A vector with a magnitude equal to one is called a unit vector. Thus,
\(\begin{array}{l}\hat i\ \text{is a unit vector of I, where}\ |\hat i| = 1.\end{array} \)
- Co-initial Vectors: When two or more vectors have the same initial points.
- Equal Vectors: Two vectors are equal when they have the same magnitude and direction. The initial points don’t matter here. They may be represented as
\(\begin{array}{l}\vec b = \vec a\end{array} \)
- Negative of a Vector: A vector whose magnitude is the same but whose direction is opposite to the original vector, say
\(\begin{array}{l}\vec{PQ}\ \text{is called a negative vector of}\ \vec O,\ i.e.,\ \vec{QP} = -\vec{PQ}\end{array} \)
- Free Vectors: The vectors whose initial points are not fixed.
- Parallel Vectors: The vectors which may have different magnitudes but all should have the same or opposite direction are called parallel vectors.
- Collinear Vectors: Vectors which may have the same direction or are parallel or antiparallel. As magnitudes can vary, we can find some scalar vector λ for which
\(\begin{array}{l}\vec a = \lambda \vec b.\end{array} \)
- Non-collinear Vectors: Two vectors acting in different directions are called non-collinear vectors or independent vectors.
\(\begin{array}{l}\text{Though}\ \vec a\ \text{and}\ -\vec{b}\ \text{have same magnitude,}\end{array} \)
\(\begin{array}{l}\text{but we can’t express}\ \vec a\ \text{or}\ -\vec{b}\end{array} \)
in terms of one another. Two non-collinear vectors describe a plane.
- Co-planar Vectors: Two parallel vectors or non-collinear vectors are always co-planar to one another. Usually, more than two vectors, if they lie within the same plane, they are called co-planar vectors.
Important Fundamental Theorems of Vectors
In Two Dimensions:
\(\begin{array}{l}\text{If there are two non-zero or non-collinear vectors}\ \vec{p}\ \text{and}\ \vec{q},\end{array} \)
\(\begin{array}{l}\text{then any vector}\ \vec{x}\ \text{which lies in the plane of}\ \vec{p}\ \text{and}\ \vec{q}\end{array} \)
\(\begin{array}{l}\text{can be written as a linear combination of}\ \vec{p}\ \text{and}\ \vec{q}.\end{array} \)
We can also write this as there exists L and M ϵ R, such that \(\begin{array}{l}L \ast \vec p + M \ast \vec q = \vec x\end{array} \)
This also proves that,
\(\begin{array}{l}\text{if}\ L_1 \vec p + M_1 \vec q = L_2 \vec p + M_2 \vec q\ \text{exists, then we can write}\end{array} \)
L1 = L2 and M1 = M2
In Three Dimensions:
If there are three non-zero or non-collinear vectors
\(\begin{array}{l}\vec p, \vec q\ \text{and}\ \vec r,\ \text{then any vector}\ \vec{x}\end{array} \)
\(\begin{array}{l}\text{which lies in the plane of}\ \vec p, \vec q\ \text{and}\ \vec r\end{array} \)
\(\begin{array}{l}\text{can be written as a linear combination of}\ \vec p, \vec q\ \text{and}\ \vec r.\end{array} \)
We can also write this as there exists L, M and N ∈ R, such that
\(\begin{array}{l}L \vec p + M \vec q + N \vec r = \vec x\end{array} \)
This also proves that if
\(\begin{array}{l}L_1 \vec p + M_1 \vec q + N_1 \vec r = L_2 \vec p + M_2 \vec q + N_2 \vec r \end{array} \)
exists, then we can write L1 = L2, M1 = M2 and N1 = N2
Theorem 1:
\(\begin{array}{l}\text{If}\ \vec a\ \text{and}\ \vec b\ \text{be two non-collinear vectors,}\end{array} \)
\(\begin{array}{l}\text{then every vector}\ \vec i\ \text{which is co-planar with}\ \vec{a}\ \text{and}\ \vec{b}\end{array} \)
can be expressed in one and only one combination in the form of \(\begin{array}{l} x \vec a + y \vec b= \vec i\end{array} \)
where x and y are scalar components of the respective vectors.
If two vectors are perpendicular to each other, then the vectors can be supposed to be drawn along the X-axis and Y-axis, respectively. If the unit vectors along the two vectors are represented by
\(\begin{array}{l}\hat{i}\ \text{and}\ \hat{j}\ \text{respectively, then we can write that}\end{array} \)
\(\begin{array}{l} \vec t = x \vec i + y \vec j\end{array} \)
Theorem 2:
\(\begin{array}{l}\text{If}\ \vec a, \vec b\ \text{and}\ \vec c\ \text{are non-coplanar vectors, then any vector}\ \vec{i}\end{array} \)
can be uniquely expressed as a linear combination \(\begin{array}{l} \vec i = x \vec a + y \vec b + z \vec c\end{array} \)
where x, y and z are scalar components of the respective vectors.
Theorem 3:
\(\begin{array}{l}\text{If vectors }\ \vec a = a_1 \hat i + a_2 \hat j + a_3 \hat k;\end{array} \)
\(\begin{array}{l} \vec b = b_1 \hat i + b_2 \hat j + b_3 \hat k\ \text{and}\end{array} \)
\(\begin{array}{l} \vec c = c_1 \hat i + c_2 \hat j + a_3 \hat k\end{array} \)
are co-planar, then
\(\begin{array}{l}\begin{vmatrix} a_1 &a_2 &a_3 \\ b_1& b_2 &b_3 \\ c_1& c_2 &c_3 \end{vmatrix}\end{array} \)
Notes:
\(\begin{array}{l}\text{Three points with position vectors}\ \vec a, \vec b\ \text{and}\ \vec c\ \text{are collinear}\end{array} \)
if and only if there exist scalars like x, y and z all of which is not equal to zero, such that
\(\begin{array}{l}x \vec{a} + y \vec{b} + z \vec{c} = 0\ \text{and}\ x + y + z = 0\end{array} \)
\(\begin{array}{l}\text{Four points with position vectors}\ \vec a, \vec b, \vec c\ \text{and}\ \vec d\ \text{are coplanar}\end{array} \)
if and only if there exist scalars like x, y, z and w (sum of any two is not equal to zero), such that
\(\begin{array}{l}x \vec{a} + y \vec{b} + z \vec{c} + w \vec{d} = 0\ \text{and}\ x + y + z + w = 0\end{array} \)
Important Terms Used in the Theory of Vectors
Linear Combination
\(\begin{array}{l}\text{A vector }\ \vec x\ \text{is said to be a linear combination of vectors}\end{array} \)
\(\begin{array}{l}\vec {a_1}, \vec {a_2}, \vec {a_3},…….,\vec {a_n} \end{array} \)
in a way that there exists scalar \(\begin{array}{l} m_1, m_2, m_3,……., m_n \end{array} \)
and we can write \(\begin{array}{l}\vec x = \vec{a_1} m_1+ \vec{a_2} m_2+ \vec{a_3} m_3+…+\vec{a_n} m_n \end{array} \)
Linear Independence
\(\begin{array}{l}\text{A system of vectors}\ \vec {a_1}, \vec {a_2}, \vec {a_3},…….,\vec {a_n} \end{array} \)
are said to be linearly independent. If
\(\begin{array}{l}\vec x = \vec{a_1} m_1+ \vec{a_2} m_2+ \vec{a_3} m_3+…+\vec{a_n} m_n = 0\end{array} \)
which means that
m1 = m2 = m3 = … = mn = 0
Condition
- A pair of non-collinear vectors is linearly independent.
- A triad of non-coplanar vectors is linearly independent.
Linear Dependence
\(\begin{array}{l}\text{A set of vectors}\ \vec {a_1}, \vec {a_2}, \vec {a_3},…….,\vec {a_n} \end{array} \)
is said to be linearly dependent, such that scalars \(\begin{array}{l} m_1, m_2, m_3,……., m_n \end{array} \)
exists, such that all of the scalars are not equal to zero and
\(\begin{array}{l}\vec{a_1} m_1+ \vec{a_2} m_2+ \vec{a_3} m_3+…+\vec{a_n} m_n = 0\end{array} \)
Condition
- A pair of collinear vectors is linearly independent.
- A triad of coplanar vectors is linearly independent.
Related Video Lesson
Solved Questions
Question 1:
\(\begin{array}{l}\text{Points}\ P(\vec{p}),\ Q(\vec{q}),\ R(\vec{r}),\ \text{and}\ S(\vec{s})\ \text{are related as}\end{array} \)
\(\begin{array}{l}a \vec{p} + b \vec{q}+ c \vec{r} + d \vec{s}=0 \end{array} \)
and a + b + c + d = 0 (where a, b, c, d are scalars and the sum of any two is not zero). Prove that if P, Q, R and S are concyclic, then
\(\begin{array}{l}|ab||\vec p – \vec q|^2 = |cd| |\vec r – \vec s|^2\end{array} \)
Answer:
From the question given, it is understood that P, Q, R and S are coplanar.
Now, they are concyclic, too.
So we can write
PO × QO = RO × SO
Or

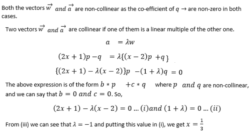
Question 2:
\(\begin{array}{l}\text{Vectors}\ \vec p\ \text{and}\ \vec{q}\ \text{are non-collinear.}\end{array} \)
Find for what value of y vector \(\begin{array}{l}\vec w = (x – 2)\vec p + \vec q\ \text{and}\ \vec a = (2x + 1)\vec p – \vec q \end{array} \)
are collinear?
Answer:
Related Articles
Frequently Asked Questions
Q1
What do you mean by a vector?
A mathematical entity that has magnitude, as well as direction, is known as a vector. It is used to represent physical quantities, like distance, acceleration, etc.
Q2
How can we calculate the magnitude of a vector?
The magnitude of a vector can be obtained by taking the square root of the sum of the squares of its components.
Q3
What are orthogonal vectors?
If the angle between two vectors is 90 degrees, then they are called orthogonal vectors.
Q4
What are equal vectors?
We can say that two or more vectors are equal, if their corresponding components are equal.
Q5
What are unit vectors?
Vectors that have a magnitude equal to 1 are called unit vectors.

Comments