The term “vector quantities” refers to physical quantities whose magnitude and direction are well specified. Vectors are represented by an arrow placed over the denotations that represent them. Example: A vehicle’s acceleration must be mentioned together with its magnitude and direction. So the acceleration of a car is a vector quantity. The three-dimensional coordinate system makes it simple to express vectors. In this article, we’ll talk about an idea called the unit vector.
What is Unit Vector?
A vector is said to be a unit vector with a unit magnitude. Another name for a unit vector is a direction vector. It is represented by a lowercase letter with the symbol of the cap (^). Unit vectors can be used to represent a vector in space. By dividing any vector by its magnitude, any vector may be converted into a unit vector:
- Unit Vector = Vector/Magnitude of Vector
- A unit vector “p” having the same direction as vector p is given as:
- \(\begin{array}{l}p = |p|\hat{p}\end{array} \)
- Where
- Unit vector p (with cap symbol) represents a unit vector
- p represents the vector
- |p| represents the magnitude of the vector
- Just because unit vectors p and q have the same magnitude does not mean that they are equal unit vectors. These unit vectors are distinct from one another because of the directions of the vectors. Therefore, both magnitude and direction must be provided in order to define a vector.
Component Form of Vector
Any vector p can be expressed in terms of its unit vectors in the Cartesian coordinate system. The unit vectors for the x, y, and z axes are correspondingly provided by unit vectors i, j & k, respectively. The position of vector p in space with respect to the origin of the specified coordinate system can be written as follows:
\(\begin{array}{l}\vec{p} = x\hat{i} + y\hat{j} + z\hat{k}\end{array} \) |
According to the above illustration, the vector p can be resolved along the three axes. A parallel pipe with the edges OA, OB, and OC lying along the three perpendicular axes is built using OM as the diagonal.
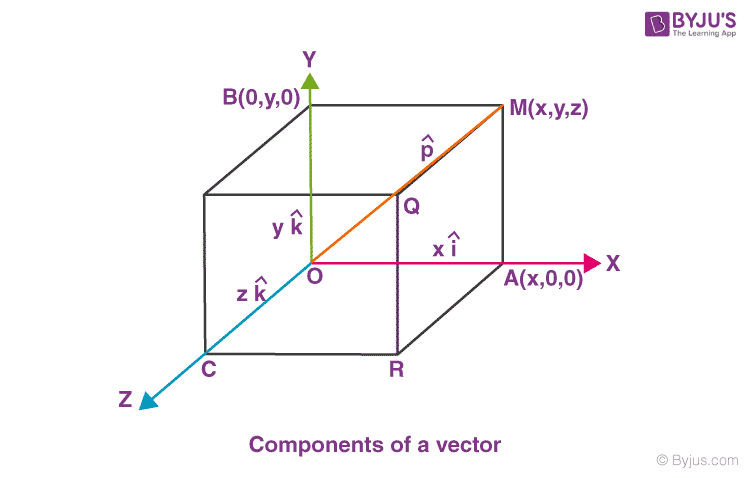
From the above figure,
\(\begin{array}{l}\vec{OA} = x\hat{i}\end{array} \)
\(\begin{array}{l}\vec{OB} = y\hat{j}\end{array} \)
\(\begin{array}{l}\vec{OC} = z\hat{k}\end{array} \) |
The vector vector p can be represented as
\(\begin{array}{l}\vec{p}=\vec{OM}=x\hat{i}+y\hat{j}+z\hat{k}\end{array} \) |
This is known as a vector’s component form. This denotes the position of the provided vectors in relation to the three co-ordinate axes.
Frequently Asked Questions – FAQs
What is the definition of a polar vector?
Calculate the unit magnitude of the unit vector.
Calculate the unit of the zero vector.
Example: Velocity of the stationary vector.
When can the two vectors be said to be equal?
When a vector is multiplied by a positive number, what happens to its direction?
Stay tuned with BYJU’S to learn more about other Physics related concepts.

Comments