What Is the Centre of Mass?
The Centre of mass of a body or system of a particle is defined as a point at which the whole of the mass of the body or all the masses of a system of a particle appear to be concentrated. In Physics, we can say that the centre of mass is a point at the centre of the distribution of mass in space (also known as the balance point), wherein the weighted relative position of the distributed mass has a sum of zero. In simple words, the centre of mass is a position that is relative to an object. We can say that it is the average position of all the parts of the system, or it is the mean location of a distribution of mass in space. It is a point where force is usually applied that results in linear acceleration without any angular acceleration.
When we are studying the dynamics of the motion of the system of a particle as a whole, then we need not bother about the dynamics of individual particles of the system. But only focus on the dynamic of a unique point corresponding to that system.
The motion of this unique point is identical to the motion of a single particle whose mass is equal to the sum of all individual particles of the system and the resultant of all the forces exerted on all the particles of the system by surrounding bodies or action of a field of force is exerted directly to that particle. This point is called the centre of mass of the system of particles. The concept of centre of mass (COM) is useful in analysing the complicated motion of the system of objects, particularly when two and more objects collide, or an object explodes into fragments.
Centre of Gravity
The centre of gravity can be taken as the point through which the force of gravity acts on an object or system. It is basically the point around which the resultant torque due to gravity forces disappears. In cases where the gravitational field is assumed to be uniform, the centre of gravity and centre of mass will be the same. Sometimes, these two terms – the centre of gravity and centre of mass are used interchangeably as they are often said to be at the same position or location.
System of Particles
The term system of particles means a well-defined collection of a large number of particles that may or may not interact with each other or are connected to each other. They may be actual particles of rigid bodies in translational motion. The particle which interacts with each other applies force on each other.
These internal forces always exist in pairs of equal magnitude and opposite directions. Other than internal forces, external forces may also act on all or some of the particles. Here, the term external force means a force that is acting on any one particle, which is included in the system by some other body outside the system.
What Is a Rigid Body?
In practice, we deal with extended bodies, which may be deformable or non-deformable or rigid. An extended body is also a system of an infinitely large number of particles having an infinitely small separation between them. When a body deforms, the separation between the distance between its particles and their relative locations changes. A rigid body is an extended object in which the separations and relative location of all of its constituent particles remain the same under all circumstances.
It is the average position of all the parts of the system, weighted according to their masses. For a simple rigid object which has a uniform density, the centre of mass is located at the centroid.
Determining the Centre of Mass
If we want to experimentally determine a body’s centre of mass, we can make use of gravity forces on the body to do so. This can be done primarily because of the fact that the centre of mass is the same as the centre of gravity in the parallel gravity field near the earth’s surface. Moreover, the centre of mass of a body with an axis of symmetry and constant density will lie on this axis. Likewise, the centre of mass of a circular cylinder having constant density will have its centre of mass on the axis of the cylinder. If we talk about a spherically symmetric body of constant density, then its COM is at the centre of the sphere. If we talk about it in a general context, for any symmetry of a body, its centre of mass will mostly be a fixed point of that symmetry.
Centre of Mass Formula
We can extend the formula to a system of particles. The equation can be applied individually to each axis,
The above formula can be used if we have point objects. But, we have to take a different approach if we have to find the centre of mass of an extended object like a rod. We have to consider a differential mass and its position and then integrate it over the entire length.
Suppose we have a rod, as shown in the figure, and we have to find its centre of mass.
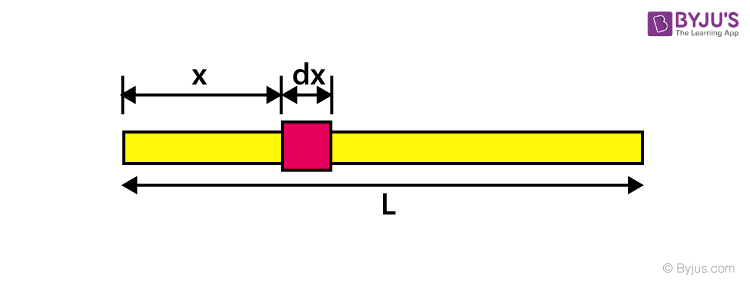
Let the total mass of the rod be M, and the density is uniform. Also, we assume that the breadth of the rod is negligible, i.e., the centre of mass lies on the x-axis. We consider a small dx at a distance from the origin. Therefore,
Using the equation for finding the centre of mass,
Integrating it from 0 to l, we get,
Using the above method, we can find the centre of mass for any geometrical shape. You can try out a semi-circular ring or a triangle. So, if a force is applied to that extended object, it can be assumed to act through the centre of mass, and hence, it can be converted to a point mass.
Summary of Formulas:
| For point objects | \(\begin{array}{l}Z_{com}= \frac{∑_{i=0}^n~m_i z_i }{M}\end{array} \) |
| For any geometrical shape | \(\begin{array}{l}X_{com}=\frac{l}{2}\end{array} \) |
Centre of mass of a body having continuous mass distribution
If the given object is not discrete and their distances are not specific, then the centre of mass can be found by considering an infinitesimal element of mass (dm) at a distance x, y and z from the origin of the chosen coordinate system,
In vector form
Centre of mass for a semi-circular ring of radius (R) and mass (M)
Solution:
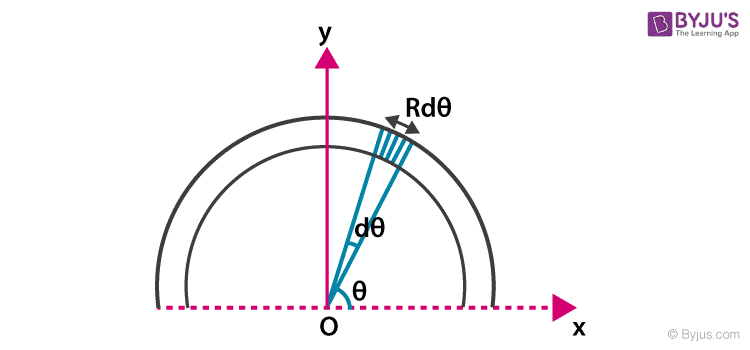
Consider a differential element of length (dl) of the ring whose radius vector makes an angle θ with the x-axis. If the angle subtended by the length (dl) is dθ at the centre, then
Then the mass of the element is dm,
Since,
and
Q. If the linear mass density of a rod of length (L) lying along the x-axis and origin at one end varies as
Solution:
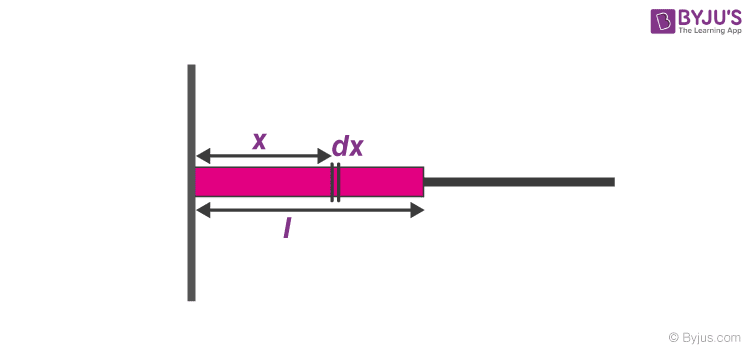
The rod lies along the x-axis, hence
For
Consider a small element of (dx) at a distance x from one end of the rod
Mass of the element
Hence, the coordinates of the centre of mass are
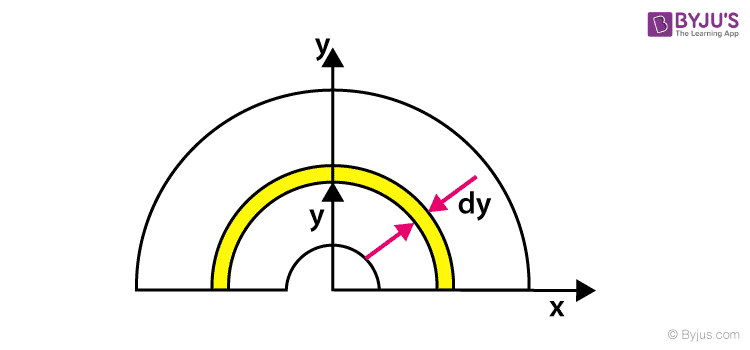
Centre of mass of a thin uniform disc of radius (R)
Solution:
The disc is an analogy of a ring. We are considering an elemental ring at y distance from origin and thickness dy.
As we know, xcm = 0 (for a ring)
Now for disc
The disc is a combination of N number of elemental rings.
ycm for a disc is
System of Particles and Centre of Mass
Till now, we have dealt with the translational motion of rigid bodies where a rigid body is also treated as a particle. But, when a rigid body undergoes rotation, all of its constituent particles do not move in an identical fashion. Still, we must treat it as a system of particles in which all the particles are rigidly connected to each other.
On the contrary, we may have particles or bodies not connected rigidly to each other but maybe interact with each other through internal forces. Despite the complex motion of which a system of the particle is capable, there is a single point known as the centre of mass or mass centre whose translational motion is characteristic of the system.
Centre of Mass of a System of Particles
For a system consisting of n particles, having masses
Here,
M is the total mass of the system,
Then,
Let an instant a system consists of a large number of particles
The mass centre motion represents the translational motion of the whole system. The sum of all particles’ linear momentum must be equal to the linear momentum of the whole mass of the system due to the translational motion of the centre of mass or mass centre.
We can also write the above equations (1) and (2) as follows:
In the above equation (3), the location of the centre of mass of a system of particles or discrete particles is as follows:
of the centre of mass in terms of components}\end{array} \)
Two particle system
Let us consider a system consisting of two particles of masses and their position vectors
Its components in Cartesian coordinate system
Either of the masses, m1 and m2, cannot be negative. Then, to satisfy the above relation,
Then
From the eq (B)
As we know, the separation distance between them is d,
This concludes that the centre of mass of the two-particle system lies between the two masses on the line joining them and divides the distance between them in the inverse ratio of their masses.
Centre of Mass of the System with Cavity
If a part of a body is taken out, the remaining part of the body is considered to have
Existing mass = [{original mass (M)} + {-mass of the removed part (m)}]
Suppose there is a body of total mass m, and a mass m1 is taken out from the body. The remaining body will have mass (m – m1), and its mass centre will be at coordinates
Where (x, y and z) are coordinates of the centre of mass of the original body and
Centre of mass of an extended object (Continuous distribution of mass):
An extended body is a collection of a large number of particles closely located; their distances are not specific, and we assume the body as a continuous distribution of mass. Consider an infinitely small portion of mass dm of the body, which is known as a mass element. The position vector of the centre of mass of such an object is given by,
Its components in the Cartesian coordinate system are as follows,
Motion of the Centre of Mass
A system consists of n number of particles having masses
If the mass of each particle of the system remains constant with time, for this system of particles with fixed mass, differentiating the above eq with respect to time, we get
Here,
Differentiating the velocity expression, we will get,
Where
The force Fi acting on the ith particle is given by,
The above eq (5) can be written as,
Where F1, F2, F3 and Fn are the forces acting on the individual particles 1, 2 and 3 … n of the system.
The internal forces are the forces exerted by the particles of the system on each other; however, from Newton’s third law, these internal forces occur in pairs of equal magnitude and opposite directions. So, their net sum is zero. Then, the above eq (6) becomes
Eq (7) states that the COM of the system of particles behaves like all the mass of the system were concentrated there, and the resultant of all the external forces acting on all the particles of the system was applied on COM.
Problems on Centre of Mass
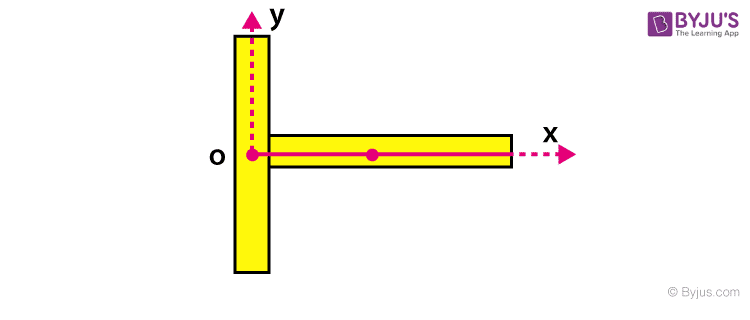
1. Two identical rods, each of mass (m) and length (L), are connected, as shown in the figure. Locate the centre of mass of the system.
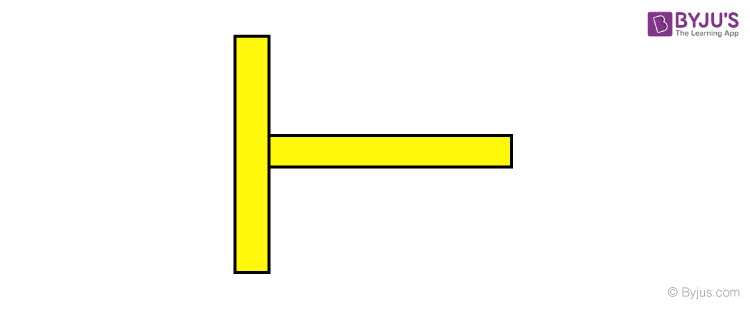
Solution:
This system is symmetrical about the x-axis; hence, we need to take the coordinates of the CM of rods.
M1 = M2 = M
L1 = L2 = L
Where M1, M2 and L1, L2 are the mass and length of Rod 1 and Rod 2
2. A system consisting of two objects has a total momentum of (16 kgm/sec)i, and its centre of mass has a velocity of (2 m/s)i. If one of the objects has a mass of 5 kg and velocity (1.6 m/s)i, what will be the mass and velocity of the other objects?
Given
Total momentum = (16 kgm/sec)i
Velocity of the centre of mass = (2 m/s)i
Mass of one object=5 kg
Velocity of this object=(1.6 m/s)i
To calculate m and ν?
Solution:
Total momentum =Total mass X × velocity of the centre of mass
(16 kgm/sec)i = (m+ 5) × (2 m/s)i
m = 3 kg
Now Vcm=(m1v1+m2v2)/(m1+m2)
2=(5 ×1.6 + 3 × v2)/(5+3)
2 = (8 + 3v2) /8
16 = 8 + 3v2
3v2 = 8
v2 = (2.67 m/s)I
Centre of mass frame In-Depth Analysis for JEE Advanced
Centre of Mass – Quick Revision for JEE
Problem illustration on Centre of Mass

Centre of Mass and Collision – Important Questions

Centre of Mass and Collision – Important Topics

Frequently Asked Questions on Centre of Mass
Is it necessary that the centre of mass should always lie inside the body?
No, it may lie outside the body.
What is the position of the centre of mass for a uniform rod, circular ring, circular disc and sphere?
In all cases, it is at the centre of the body.
Can the geometrical centre and centre of mass of a body coincide?
Yes, the geometrical centre and centre of mass of spheres, circular rings, circular discs, cubes, and cylinders can coincide.

Comments